基于得分的扩散模型
Score Matching
Estimation of Non-Normalized Statistical Models by Score Matching提出了一种用于估计非归一化统计模型的新方法——分数匹配。该方法巧妙地避免了计算模型中难以处理的归一化常数,为后续的扩散模型等研究奠定了重要基础。
得分定义
一个概率分布的得分函数是其对数概率密度关于数据的梯度 \(\boldsymbol{S}(\boldsymbol{x} ;\boldsymbol{\theta})=\left(\begin{array}{c} \frac{\partial\log p(\boldsymbol{x} ;\boldsymbol{\theta})}{\partial x_{1}}\\ \vdots\\ \frac{\partial\log p(\boldsymbol{x} ;\boldsymbol{\theta})}{\partial x_{n}} \end{array}\right)=\left(\begin{array}{c} S_{1}(\boldsymbol{x} ;\boldsymbol{\theta})\\ \vdots\\ S_{n}(\boldsymbol{x} ;\boldsymbol{\theta}) \end{array}\right)=\nabla_{\boldsymbol{x}}\log p(\boldsymbol{x} ;\boldsymbol{\theta})\)
训练目标
目标函数:最小化模型分数函数与真实数据分数函数之间的期望平方差
\(\begin{align*}
J(\boldsymbol{\theta}) &=\frac{1}{2} \int_{\boldsymbol{x} \in \mathbb{R}^{n}} p_{\mathbf{d}}(\boldsymbol{x})\left\|\boldsymbol{S_m}(\boldsymbol{x} ; \boldsymbol{\theta})-\boldsymbol{S}_{\mathbf{d}}(\boldsymbol{x})\right\|^{2} d \boldsymbol{x} \\
& = \frac{1}{2}\int_{\mathbb{R}^{n}} p_{\mathrm{d}}(\boldsymbol{x}) \left[ \|\boldsymbol{S}_{m}(\boldsymbol{x};\boldsymbol{\theta})\|^2 - 2\boldsymbol{S}_{m}(\boldsymbol{x};\boldsymbol{\theta})^{\top}\boldsymbol{S}_{\mathrm{d}}(\boldsymbol{x}) + \|\boldsymbol{S}_{\mathrm{d}}(\boldsymbol{x})\|^2 \right] d\boldsymbol{x} \\
& = \frac{1}{2}\int_{\mathbb{R}^{n}} p_{\mathrm{d}}(\boldsymbol{x}) \left[ \|\boldsymbol{S}_{m}(\boldsymbol{x};\boldsymbol{\theta})\|^2 - 2\boldsymbol{S}_{m}(\boldsymbol{x};\boldsymbol{\theta})^{\top}\boldsymbol{S}_{\mathrm{d}}(\boldsymbol{x}) \right] d\boldsymbol{x} + C
\end{align*}\)
第二项通过分部积分化简
\[\begin{align*} \int_{\mathbb{R}^{n}} p_{\mathrm{d}}(\boldsymbol{x}) \left( -2 \boldsymbol{S}_{m}(\boldsymbol{x};\boldsymbol{\theta})^{\top} \boldsymbol{S}_{\mathrm{d}}(\boldsymbol{x}) \right) d\boldsymbol{x} & = \int_{\mathbb{R}^{n}} p_{\mathrm{d}}(\boldsymbol{x}) \left( -2 \boldsymbol{S}_{m}(\boldsymbol{x};\boldsymbol{\theta})^{\top} \frac{\nabla_{\boldsymbol{x}} p_{\mathrm{d}}(\boldsymbol{x})}{p_{\mathrm{d}}(\boldsymbol{x})} \right) d\boldsymbol{x} \\ & = -2 \int_{\mathbb{R}^{n}} \boldsymbol{S}_{m}(\boldsymbol{x};\boldsymbol{\theta})^{\top} \nabla_{\boldsymbol{x}} p_{\mathrm{d}}(\boldsymbol{x}) d\boldsymbol{x} \\ & = 2 \int_{\mathbb{R}^{n}} div (\boldsymbol{S}_{m}(\boldsymbol{x};\boldsymbol{\theta})) p_{\mathrm{d}}(\boldsymbol{x}) d\boldsymbol{x} \end{align*}\]代入原等式可得:
\[\begin{align*} J(\boldsymbol{\theta}) & = \frac{1}{2}\int_{\mathbb{R}^{n}} p_{\mathrm{d}}(\boldsymbol{x}) \left[ \|\boldsymbol{S}_{m}(\boldsymbol{x};\boldsymbol{\theta})\|^2 - 2\boldsymbol{S}_{m}(\boldsymbol{x};\boldsymbol{\theta})^{\top}\boldsymbol{S}_{\mathrm{d}}(\boldsymbol{x}) \right] d\boldsymbol{x} + C \\ &= \frac{1}{2}\int_{\mathbb{R}^{n}} p_{\mathrm{d}}(\boldsymbol{x}) \left[ \|\boldsymbol{S}_{m}(\boldsymbol{x};\boldsymbol{\theta})\|^2 + 2div(\boldsymbol{S}_{m,i}(\boldsymbol{x};\boldsymbol{\theta})) \right] d\boldsymbol{x} + C \\ &= \int_{\mathbb{R}^{n}} p_{\mathrm{d}}(\boldsymbol{x}) \left[ \frac{1}{2}\|\boldsymbol{S}_{m}(\boldsymbol{x};\boldsymbol{\theta})\|^2 + div(\boldsymbol{S}_{m,i}(\boldsymbol{x};\boldsymbol{\theta})) \right] d\boldsymbol{x} + C \\ \end{align*}\]采样方式
给定得分函数$\boldsymbol{S}(\boldsymbol{x};\boldsymbol{\theta})=\nabla_{\boldsymbol{x}}\log p(\boldsymbol{x};\boldsymbol{\theta})$后可以通过朗之万动力学采样。
为什么朗之万动力学可以采样得分函数?
由连续性方程与福克普朗克方程等价关系可知,对于速度场为0的ODE其等价的SDE方程为:
\(dX_t = \frac{\sigma^2_t}{2} \nabla_x \log p(X_t) dt + \sigma_t dW\)
根据欧拉-丸山法,其离散形式为: \(\mathbf{x}_{t+1}=\mathbf{x}_t+ \frac {\sigma^2_t} 2 \nabla_{\mathbf{x}} \log p\left(\mathbf{x}_t\right)\Delta t+\sigma_t \sqrt{\Delta t} \mathbf{z}, \quad \mathbf{z} \sim \mathcal{N}(0, \mathbf{I})\)
令$\tau = \frac{\sigma^2_t \Delta t}{2}$及扩散系数$\sigma_t$不随时间变化得到朗之万动力学公式:
\(\mathbf{x}_{t+1}=\mathbf{x}_t+\tau \nabla_{\mathbf{x}} \log p\left(\mathbf{x}_t\right)+\sqrt{2 \tau} \mathbf{z}, \quad \mathbf{z} \sim \mathcal{N}(0, \mathbf{I})\)
因概率密度不随时间变化(动态平衡),粒子在不同概率区域停留的时间,正比于该区域的概率密度。最终,我们记录下粒子运动的轨迹,这个轨迹就是目标分布p(x)的样本。
Score-SDE
Score-based generative modeling through stochastic differential equations将基于分数的生成建模(score-based generative modeling)与随机微分方程(SDE)统一起来,提出了一个连续的、更一般的生成建模框架。传统的基于分数的生成模型(如NCSN、DDPM)本质上是离散时间、多噪声尺度的扩散过程。本文提出用连续时间的随机微分方程(SDE) 来建模这一过程,并将去噪分数匹配(denoising score matching) 与朗之万动力学采样(Langevin dynamics sampling) 统一到SDE的框架下。
背景知识
对于Noise Conditional Score Network (NCSN)其训练目标是如下的去噪得分匹配的加权和: \(\begin{equation*} \boldsymbol{\theta}^* = \operatorname{arg min}_{\boldsymbol{\theta}} \sum_{i=1}^N \sigma_i^2 \mathbb{E}_{p_{\text{data}}(\mathbf{x})} \mathbb{E}_{p_{\sigma_i}(\tilde{\mathbf{x}}|\mathbf{x})} \left[ \left\| \mathbf{s}_{\boldsymbol{\theta}}(\tilde{\mathbf{x}}, \sigma_i) - \nabla_{\tilde{\mathbf{x}}} \log p_{\sigma_i}(\tilde{\mathbf{x}} | \mathbf{x}) \right\|_{2}^{2} \right]. \tag 1 \end{equation*}\) 对于每一个噪声层级$i$使用Langevin MCMC采样: \(\begin{equation*} \mathbf{x}_i^m = \mathbf{x}_i^{m-1} + \epsilon_i S_\theta^*(\mathbf{x}_i^{m-1}, \sigma_i) + \sqrt{2\epsilon_i}\mathbf{z}_i^m, \quad m=1,2,\dots,M, \end{equation*}\) 对于DENOISING DIFFUSION PROBABILISTIC MODELS (DDPM)其优化目标如下加权的证据下届evidence lower bound (ELBO)。 \(\begin{equation*} \theta^* = \arg \min_{\theta} \sum_{i=1}^{N} (1 - \alpha_i) \mathbb{E}_{p_{\text{data}}(\mathbf{x})} \mathbb{E}_{p_{\alpha_i}(\tilde{\mathbf{x}}|\mathbf{x})} \left[ \left\| \mathbf{s}_{\theta}(\tilde{\mathbf{x}}, i) - \nabla_{\tilde{\mathbf{x}}} \log p_{\alpha_i}(\tilde{\mathbf{x}} | \mathbf{x}) \right\|^2_2 \right] \tag 3 \end{equation*}\) 其中: \(\begin{gather*} p(x_i | x_{i-1}) = \mathcal{N}\!\left(x_i; \sqrt{1 - \beta_i} \, x_{i-1}, \beta_i \mathbf{I}\right) \\ p_{\alpha_i}(x_i | x_0) = \mathcal{N}\!\left(x_i; \sqrt{\alpha_i} \, x_0, (1 - \alpha_i) \mathbf{I}\right) \end{gather*}\) 注意这里的$\alpha_i$相当于原DDPM论文中的$\bar {\alpha_i}$。 其反向祖先采样过程如下: \(\begin{equation*} \mathbf{X}_{i-1} = \frac{1}{\sqrt{1 - \beta_i}}\left(\mathbf{X}_i + \beta_i \mathbf{S}_{\theta*}(\mathbf{X}_i, i)\right) + \sqrt{\beta_i}\mathbf{Z}_i, \quad i = N, N-1, \dots, 1. \end{equation*}\)
扩散模型连续化表示-SDE
扩散过程可由Itˆo SDE建模: [ d\mathbf{x} = \mathbf{f}(\mathbf{x},t)dt + g(t)d\mathbf{w}, \tag 5 ] 其中f是漂移项,g是扩散项。 根据Reverse-time diffusion equation models扩散过程的逆过程也是SDE,且公式如下: [ \mathbf{dx} = \left[\mathbf{f}(\mathbf{x},t) - g(t)^2 \nabla_{\mathbf{x}} \log p_t(\mathbf{x})\right]dt + g(t)d\bar{\mathbf{w}}, \tag 6 ]
为评估得分$\nabla_{\mathbf{x}} \log p_t(\mathbf{x})$,可以训练一个连续泛化版的目标函数: [ \theta^* = \underset{\theta}{\arg \min} \mathbb{E}t \left{ \lambda(t) \mathbb{E}{\mathbf{x}(0)} \mathbb{E}{\mathbf{x}(t)|\mathbf{x}(0)} \left[ \left| \mathbf{s}\theta(\mathbf{x}(t), t) - \nabla_{\mathbf{x}(t)} \log p_{0t}(\mathbf{x}(t) | \mathbf{x}(0)) \right|_2^2 \right] \right}. \tag 7 ] 其中$λ$是权重函数。
漂移项f和扩散项g
NCSN/SMLD
得分匹配扩散模型离散前向过程为:
[
\mathbf{x}i = \mathbf{x}{i-1} + \sqrt{\sigma_i^2 - \sigma_{i-1}^2} \mathbf{z}_{i-1}, \quad i = 1, \dots, N \tag {20}
]
令$t=i/N,\Delta t=1/N$, 公式20可以如下表示:
\(\begin{align*}
\mathbf{x}(t+\Delta t) &= \mathbf{x}(t) + \sqrt{\sigma^2(t+\Delta t) - \sigma^2(t)} \mathbf{z}(t) \\
&\approx \mathbf{x}(t) + \sqrt{\frac{\mathrm{d}[\sigma^2(t)]}{\mathrm{d}t}\Delta t} \mathbf{z}(t)
\end{align*}\)
当$N \rightarrow \infin, \Delta t \rightarrow 0$时可得时间连续DCSN的SDE方程如下:
[
\mathrm{d}\mathbf{x} = \sqrt{\frac{\mathrm{d}[\sigma^2(t)]}{\mathrm{d}t}}\mathrm{d}\mathbf{w}. \tag {21}
]
注:$d\mathbf{w}=\sqrt{\Delta t}\mathbf{z}$
DDPM
对于去噪扩散模型,其前向过程每一步加噪由如下公式定义:
[
\mathbf{x}i = \sqrt{1 - \beta_i}\mathbf{x}{i-1} + \sqrt{\beta_i}\mathbf{z}_{i-1}, \quad i = 1, \dots, N,
\tag {22}
]
其中$\beta_i为每一步噪声,当步数N走够大时,每个\beta_i都是很小的$,令$\beta(t)=N\beta_i,t=i/N,\Delta t=1/N$,
\(\begin{align*} \mathbf{x}(t + \Delta t) &= \sqrt{1 - \beta(t + \Delta t)\Delta t} \mathbf{x}(t) + \sqrt{\beta(t + \Delta t)\Delta t} \mathbf{z}(t) \\ &\approx \mathbf{x}(t) - \frac{1}{2}\beta(t + \Delta t)\Delta t \mathbf{x}(t) + \sqrt{\beta(t + \Delta t)\Delta t} \mathbf{z}(t) \quad // \sqrt{1 - \varepsilon} \approx 1 - \frac{1}{2} \varepsilon; \quad \varepsilon \text{当很小时,这里}\varepsilon=\beta(t + \Delta t)\Delta t \\ &\approx \mathbf{x}(t) - \frac{1}{2}\beta(t)\Delta t \mathbf{x}(t) + \sqrt{\beta(t)\Delta t} \mathbf{z}(t), \end{align*}\) 当$N \rightarrow \infin, \Delta t \rightarrow 0$时,可得时间连续DDPM的SDE方程如下: [ \mathrm{d}\mathbf{x} = -\frac{1}{2}\beta(t)\mathbf{x}\,\mathrm{d}t + \sqrt{\beta(t)}\,\mathrm{d}\mathbf{w}. \tag {24} ] 需要注意的是:在NCSN中$\sigma_i=\sigma(t)$,但是在DDPM中$\beta_i \not=\beta(t)$,而是$\beta(t)=N\beta_i$,但是仍然都使用符号$\beta$,很容易误以为是想等的。
逆扩散采样
根据Reverse-time SDE公式: [ \mathbf{dx} = \left[\mathbf{f}(\mathbf{x},t) - g(t)^2 \nabla_{\mathbf{x}} \log p_t(\mathbf{x})\right]dt + g(t)d\bar{\mathbf{w}}, \tag 6 ] 可知拟扩散过程采样一般公式如下: [ \mathbf{x}(t-\Delta t) =\mathbf{x}(t) - \left[\mathbf{f}(\mathbf{x},t) - g(t)^2 \nabla_{\mathbf{x}} \log p_t(\mathbf{x})\right]\Delta t + g(t)d\bar{\mathbf{w}}, \tag {46} ]
DCSN
对于去噪扩散模型$\mathbf{f}(\mathbf{x},t)=0,g(t)=\sqrt{\frac{\mathrm{d}[\sigma^2(t)]}{\mathrm{d}t}}$,因此有: \(\begin{align*} \mathbf{x}(t-\Delta t) &=\mathbf{x}(t) - \left[0 - \frac{\mathrm{d}[\sigma^2(t)]}{\mathrm{d}t} \mathbf{s}_{\boldsymbol{\theta}^*}(\mathbf{x}_{t}, t)\right]\Delta t + \sqrt{\frac{\mathrm{d}[\sigma^2(t)]}{\mathrm{d}t}}d\bar{\mathbf{w}} \\ &=\mathbf{x}(t) + \frac{\sigma^2(t-\Delta t)-\sigma^2(t)}{-\Delta t} \mathbf{s}_{\boldsymbol{\theta}^*}(\mathbf{x}_{t}, t)\Delta t + \sqrt{\frac{\sigma^2(t-\Delta t)-\sigma^2(t)}{-\Delta t} }\sqrt{\Delta t}\mathbf{z} \\ &=\mathbf{x}(t) + \left(\sigma^2(t)-\sigma^2(t-\Delta t)\right) \mathbf{s}_{\boldsymbol{\theta}^*}(\mathbf{x}_{t}, t) + \sqrt{\sigma^2(t)-\sigma^2(t-\Delta t)}\mathbf{z} \end{align*}\) 使用原始的离散符号表示有: [ \mathbf{x}{i-1} = \mathbf{x}_i + (\sigma_i^2 - \sigma{i-1}^2)\mathbf{s}{\theta^\ast}(\mathbf{x}_i, i) + \sqrt{(\sigma_i^2 - \sigma{i-1}^2)}\mathbf{z}i, i = 1, 2, \dots, N ] 论文中给出的离散采样公式如下: [ \mathbf{x}{i-1} = \mathbf{x}i + (\sigma_i^2 - \sigma{i-1}^2)\mathbf{s}{\theta^\ast}(\mathbf{x}_i, i) + \sqrt{\frac{\sigma{i-1}^2(\sigma_i^2 - \sigma_{i-1}^2)}{\sigma_i^2}}\mathbf{z}_i, i = 1, 2, \dots, N \tag {47} ] 这与Reverse-time SDE推导有结果细微差异,原文中说明参考DDPM给的方差值,而DDPM通过每一个反向步也近似为高斯过程推导得到的,且说这两种方差结果相似。也不清楚为何要参考DDPM的,而不是用SDE推导的结果,DDPM与DCSN噪声调度有较大差异。
DDPM
对于去噪扩散模型$\mathbf{f}(\mathbf{x},t)=-\frac 1 2 \beta(t)\mathbf{x},g(t)=\sqrt{\beta(t)}$,因此有:
\(\begin{align*}
\mathbf{x}(t-\Delta t) &=\mathbf{x}(t) - \left[-\frac 1 2 \beta(t)\mathbf{x}(t) - \beta(t) \mathbf{s}_{\boldsymbol{\theta}^*}(\mathbf{x}_{t}, t)\right]\Delta t + \sqrt{\beta(t)}d\bar{\mathbf{w}} \\
&=\mathbf{x}(t) + \left[\frac 1 2 \mathbf{x}(t) + \mathbf{s}_{\boldsymbol{\theta}^*}(\mathbf{x}_{t}, t)\right]\beta(t)\Delta t + \sqrt{\beta(t)\Delta t}\mathbf{z} \\
\Leftrightarrow \mathbf{x}_{i-1} &= \mathbf{x}_i + \left[\frac 1 2 \mathbf{x}_i + \mathbf{s}_{\boldsymbol{\theta}^*}(\mathbf{x}_{i}, i)\right]\beta_i + \sqrt{\beta_i}\mathbf{z_i} \qquad //由\beta(t)=N\beta_i,\Delta t=1/N=>\beta(t)\Delta t=\beta_i \\
&=(1+\frac 1 2 \beta_i)\mathbf{x}_i + \beta_i \mathbf{s}_{\boldsymbol{\theta}^*}(\mathbf{x}_{i}, i)+ \sqrt{\beta_i}\mathbf{z_i} \tag {DDPM-Sampler}
\end{align*}\)
本文直接从DDPM离散采样过程公式推导转换,做了如下推导(不清楚意义在哪里,原本就是逆过程采样,推导后表达形式不一样了)
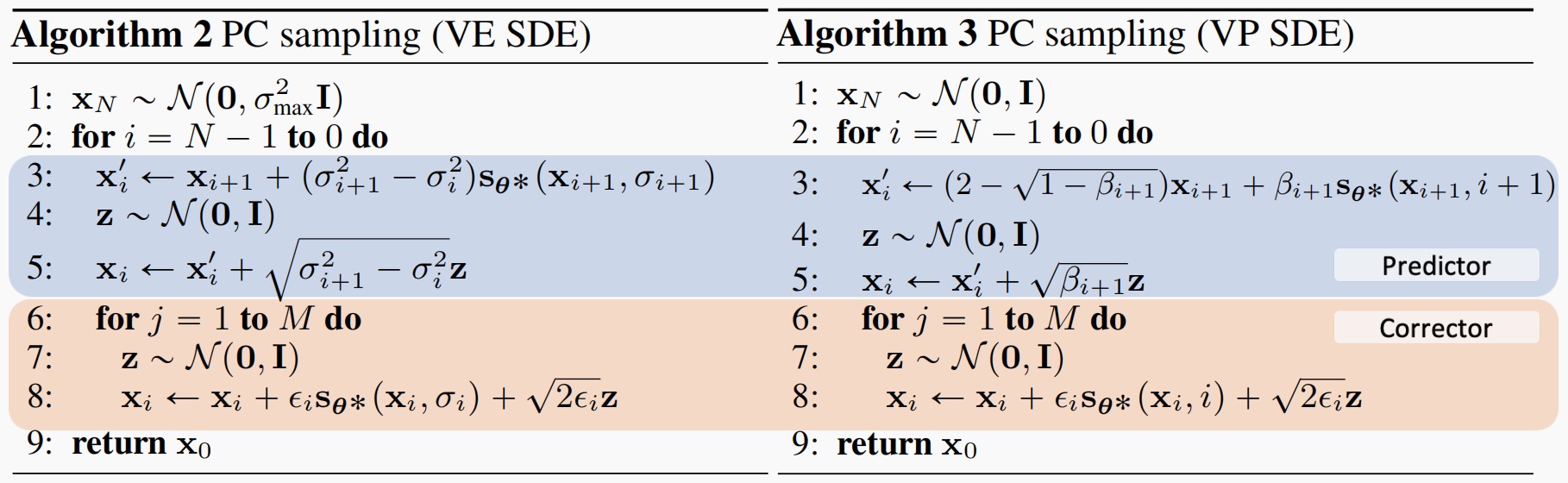
PREDICTOR-CORRECTOR SAMPLERS
原始的DDPM采样过程其实就是一个去噪过程(预测器),而原始NCSN的采样过程仅在每个噪声层级采样t时刻分布的样本(校正器),本文提出一个预测-校正采样器每个采样执行一次去噪预测和当前噪声等级的朗之万动力学采样,预测-校正采样器比单纯的去噪预测或单纯校正采样效果要好。
VE&VP&sub-VP
DDPM
对于公式24表示的DDPM SDE过程,其边缘分布$p_t(\mathbf{x})$的斜方差微分方程如下: [ \frac{d\Sigma_{\text{VP}}(t)}{dt} = \beta(t)(\mathbf{I} - \Sigma_{\text{VP}}(t)), ] 使用ODE的积分因子法或常数变异法可得: [ \Sigma_{\text{VP}}(t) = \mathbf{I} + e^{\int_0^t -\beta(s) \, ds} \left(\Sigma_{\text{VP}}(0) - \mathbf{I}\right) ] 因$0<e^{\int_0^t -\beta(s) \, ds}<=1$,因此$\Sigma_{\text{VP}}(t)$就是$\Sigma_{\text{VP}}(0)$和$\mathbf{I}$的线性组合,因此方差是有届的,故命名为 Variance Preserving (VP) SDE。
sub-VP SDE
受VP SDE的启发,本文提出sub-VP SDE公式如下: [ \mathrm{d}\mathbf{x} = -\frac{1}{2}\beta(t)\mathbf{x} \, \mathrm{d}t + \sqrt{\beta(t)\left(1 - e^{-2\int_{0}^{t}\beta(s) \, \mathrm{d}s}\right)} \, \mathrm{d}\mathbf{w}. \tag {27} ] 其边缘分布$p_t(\mathbf{x})$的斜方差为: [ \Sigma_{\text{sub-VP}}(t) = \mathbf{I} + e^{-2 \int_0^t \beta(s) ds} \mathbf{I} + e^{-\int_0^t \beta(s) ds} \left(\Sigma_{\text{sub-VP}}(0) - 2\mathbf{I}\right), \tag {28} ] 比较两式可知,sub-VP的斜方差总是小于对应的VP的斜方差,方差越小数据越干净,采样轨迹越平滑。
DCSN
对于去噪得分匹配其边缘分布的斜方差为$\Sigma_{\text{VE}}(t)=[\sigma^2(t) - \sigma^2(0)]\mathbf{I}$。
总结
VE、VP和sub-VP SDEs的漂移系数均为仿射形式,这使得前向过程的转移核具有解析解,均为高斯核,定义如下:
\(p_{0t}(\mathbf{x}(t) \mid \mathbf{x}(0)) = \left\{ \begin{array}{ll} \mathcal{N}(\mathbf{x}(t); \mathbf{x}(0), [\sigma^2(t) - \sigma^2(0)]\mathbf{I}), \\ \mathcal{N}(\mathbf{x}(t); \mathbf{x}(0)e^{-\frac{1}{2}\int_0^t \beta(s)ds}, \mathbf{I} - \mathbf{I}e^{-\int_0^t \beta(s)ds}) \\ \mathcal{N}(\mathbf{x}(t); \mathbf{x}(0)e^{-\frac{1}{2}\int_0^t \beta(s)ds}, [1 - e^{-\int_0^t \beta(s)ds}]^2\mathbf{I}) \end{array} \right.\) 因此所有的SDE均可以使用公式7定义的目标函数有效的训练。
SDE 边缘分布均值和方差的微分方程
对于由随机微分方程(SDE)定义的随机过程: [ d\mathbf{x} = f(\mathbf{x}, t) \, dt + g(\mathbf{x}, t) \, d\mathbf{w}, ] 其中 (\mathbf{x}) 是随机变量(可以是向量),(f) 是漂移项,(g) 是扩散项,(\mathbf{w}) 是维纳过程(布朗运动),其均值和方差的微分方程如下。
均值 (\boldsymbol{\mu}(t) = \mathbb{E}[\mathbf{x}(t)]) 的微分方程: [ \frac{d\boldsymbol{\mu}}{dt} = \mathbb{E}[f(\mathbf{x}, t)]. ]
方差(协方差矩阵)(\mathbf{\Sigma}(t) = \mathbb{E}[(\mathbf{x}(t) - \boldsymbol{\mu}(t))(\mathbf{x}(t) - \boldsymbol{\mu}(t))^\top]) 的微分方程: [ \frac{d\mathbf{\Sigma}}{dt} = \mathbb{E}[(\mathbf{x} - \boldsymbol{\mu}) f(\mathbf{x}, t)^\top + f(\mathbf{x}, t) (\mathbf{x} - \boldsymbol{\mu})^\top] + \mathbb{E}[g(\mathbf{x}, t) g(\mathbf{x}, t)^\top]. ]
线性 SDE
当 (f) 和 (g) 具有线性形式,即: [ d\mathbf{x} = (A(t) \mathbf{x} + b(t)) \, dt + G(t) \, d\mathbf{w}, ] 其中 (A(t))、(b(t)) 和 (G(t)) 是确定性函数,则均值和方差的微分方程封闭: [ \frac{d\boldsymbol{\mu}}{dt} = A(t) \boldsymbol{\mu} + b(t), ] [ \frac{d\mathbf{\Sigma}}{dt} = A(t) \mathbf{\Sigma} + \mathbf{\Sigma} A(t)^\top + G(t) G(t)^\top. ]
对于一般的非线性 (f) 和 (g),上述方程不是封闭的,需要知道 (\mathbf{x}) 的全分布来计算期望。