引导和可控生成
分类
Classifier Guidance
Classifier-Free Guidance
Training-Free Guidance
\[\begin{equation*} \nabla_{\mathbf{x}_t} \log p_t(\mathbf{x}_t | \mathbf{y}) = \nabla_{\mathbf{x}_t} \log p_t(\mathbf{x}_t) + \nabla_{\mathbf{x}_t} \log p_t(\mathbf{y} | \mathbf{x}_t) \end{equation*}\]Score ALD
ILVR
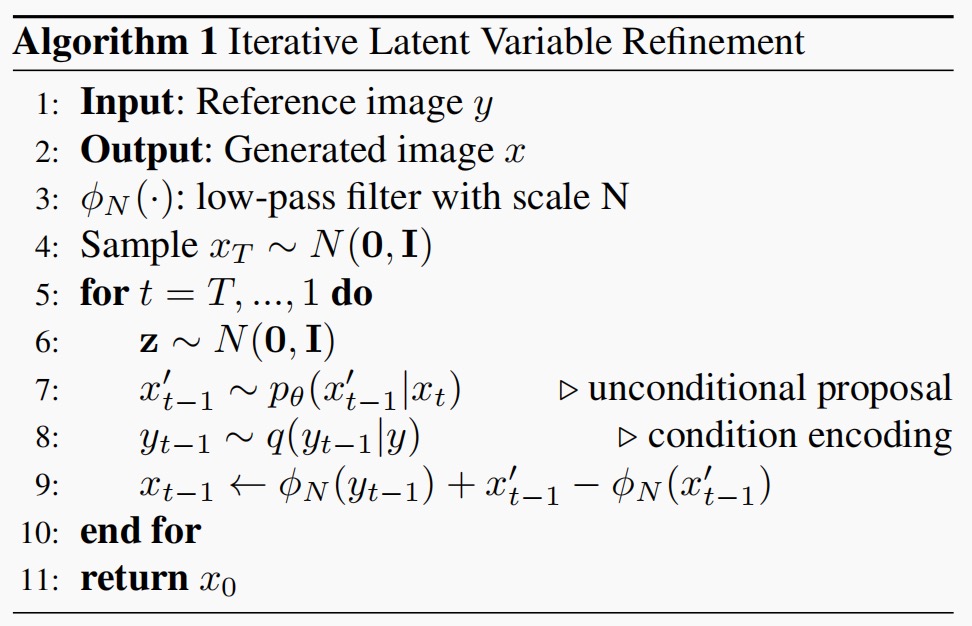
[Conditioning Method for Denoising Diffusion Probabilistic Models)(http://arxiv.org/pdf/2108.02938)核心思想是利用一个低通滤波器将参考图像的结构信息作为条件,引导扩散模型的生成过程,而无需重新训练模型。如果生成的图像与参考图像在低频成分上一致,那么它们在整体结构上就会相似。高频细节则可以自由生成,实现多样性。
背景回顾
对于DDPM,其前向加噪过程如下:
[
q(\mathbf{x}t | \mathbf{x}{t-1}) := \mathcal{N}(\mathbf{x}t; \sqrt{1 - \beta_t} \mathbf{x}{t-1}, \beta_t \mathbf{I}), \tag 1
]
其中$\beta_t$为固定的方差。
给定干净样本$x_0$, t时刻的带噪样本为:
[
q(x_t \vert x_0) := N(x_t; \sqrt{\alpha_t} x_0, (1 - \bar{\alpha}t)\mathbf{I}), \tag 2
]
其中: $\alpha_t = 1 - \beta_t \quad \text{且} \quad \bar{\alpha}_t := \prod{s=1}^{t} \alpha_s$。
因此$x_t$可表示为干净样本$x_0$和噪声$\epsilon$的线性组合:
[
x_t = \sqrt{\alpha_t} x_0 + \sqrt{1 - \alpha_t} \epsilon \tag 3
]
DDPM近似反向采样过程为一个高斯过程,均值可学习,方差固定:
[
p_\theta(x_{t-1}|x_t) = N(x_{t-1}; \mu_\theta(x_t, t), \sigma_t^2 \mathbf{I}). \tag 4
]
建模噪声网络替代均值网络,反向采样过程如下:
[
x_{t-1} = \frac{1}{\sqrt{\alpha_t}} \left( x_t - \frac{1 - \alpha_t}{\sqrt{1 - \alpha_t}} \epsilon_\theta(x_t, t) \right) + \sigma_t \mathbf{z}, \tag 5
]
给定条件c,从条件分布$p(x_0 \vert c)$采样:
[
\begin{align}
p_{\theta}(x_0|c) &= \int p_{\theta}(x_{0:T}|c)dx_{1:T},
p_{\theta}(x_{0:T}|c) &= p(x_T) \prod_{t=1}^{T} p_{\theta}(x_{t-1}|x_t, c). \tag 6
\end{align}
]
可分解为每个转移都带有条件c的转移积分。
关键近似
给定参考图像y,条件c确保生成的图像$x_0$下采样的图像$\phi_N(x_0)$与参考图像的下采样图像$\phi_N(y)$相等,$\phi_N(\cdot)$为低通滤波操作,对图像下采样N倍,然后上采样N倍。
根据前向过程公式3,对于每个转移有:
[
p_\theta(x_{t-1}|x_t, c) \approx p_\theta(x_{t-1}|x_t, \phi_N(x_{t-1}) = \phi_N(y_{t-1})) \tag 7
]
为区分无条件和有条件,$x’{t-1}$表示无条件样本,$x{t-1}$表示带条件样本,则有如下关系:
[
\begin{align}
x’_{t-1} &\sim p_{\theta}(x’_{t-1}|x_t), \ x_{t-1} &= \phi(y_{t-1}) + (I - \phi)(x’_{t-1}). \tag 8
\end{align}
]
带条件样本为 低通部分(取参考图像) + 高通部分(取无条件)
ILVR算法流程如下图:
性质1: 只要低通滤波相等就可以作为参考图像: [ Y = { y : \phi_N(y) = \phi_N(x), x \in \mu }, ]
性质2: 下采样因子越大,参考图像选择面越大。 [ R_N \subset R_M \subset \mu, ]
RED-Diff
A VARIATIONAL PERSPECTIVE ON SOLVING INVERSE PROBLEMS WITH DIFFUSION MODELS 暂时没有看懂
Denoising Diffusion Null Models (DDNM)
Denoising Diffusion Restoration Models (DDRM)
ΠGDM
Pseudoinverse-guided diffusion models for inverse problems
假设我们拥有对某个信号 ( x_0 \in \mathbb{R}^n ) 的测量值 ( y \in \mathbb{R}^m ),其关系为
[y = Hx_0 + z, \tag{2}]
其中 ( H \in \mathbb{R}^{n \times m} ) 是已知的测量矩阵,( z \sim \mathcal{N}(0, \sigma_y^2 I) ) 是一个独立同分布的高斯噪声向量,其各维度上的标准差 ( \sigma_y ) 已知。
我们的目标是求解这个逆问题,从测量值 ( y ) 中恢复出原始信号 ( x_0 \in \mathbb{R}^n )。
$p_t(\mathbf{x}_0 \vert \mathbf{x}_t)$使用高斯近似(ΠGDM的关键近似):
[
p_t(\mathbf{x}_0|\mathbf{x}_t) \approx \mathcal{N}(\hat{\mathbf{x}}_t, r_t^2 \mathbf{I}), \tag 4
]
均值使用Tweedie公式估计:
\(\begin{equation*}
\hat{\mathbf{x}}_t = \mathbb{E}[\mathbf{x}_0 | \mathbf{x}_t] = \mathbf{x}_t + \sigma_t^2 \nabla_{\mathbf{x}_t} \log p_t(\mathbf{x}_t) \approx \mathbf{x}_t + \sigma_t^2 S_\theta(\mathbf{x}; \sigma_t). \tag 5
\end{equation*}\)
其中$p_t(\mathbf{x}_t \vert \mathbf{x}_0) \sim \mathcal{N}({\mathbf{x}}_0, \sigma_t^2 \mathbf{I})$,注意:$r_t$与$\sigma_t$不同
显然$p_t(\mathbf{y} \vert \mathbf{x}_t)$也是高斯分布:
[
p_t(\mathbf{y} | \mathbf{x}_t) \approx \mathcal{N}(\mathbf{H}\hat{\mathbf{x}}_t, r_t^2 \mathbf{H}\mathbf{H}^\top + \sigma_y^2 \mathbf{I}).
]
可以推导出$p_t(\mathbf{y} \vert \mathbf{x}_t)$的得分:
\(\begin{align*}
\log p_t(\mathbf{y}|\mathbf{x}_t) &= -\frac{1}{2} (\mathbf{y} - H\hat{\mathbf{x}}_t)^\top \Sigma_t^{-1} (\mathbf{y} - H\hat{\mathbf{x}}_t) + \text{const} \quad // \text{取对数,忽略常数项} \\
\nabla_{\mathbf{x}_t} \log p_t(\mathbf{y}|\mathbf{x}_t) &= -\frac{1}{2} \nabla_{\mathbf{x}_t} ((\mathbf{y} - H\hat{\mathbf{x}}_t )^\top \Sigma_t^{-1} (\mathbf{y} - H\hat{\mathbf{x}}_t )) \quad // \text{记协方差为}\Sigma_t \\
&= - (\frac{\partial {(\mathbf{y} - H\hat{\mathbf{x}}_t})}{\partial \mathbf{x}_t} )^\top \Sigma_t^{-1} ({\mathbf{y} - H\hat{\mathbf{x}}_t}) \\
&= (H \frac{\partial \hat{\mathbf{x}}_t}{\partial \mathbf{x}_t})^\top \Sigma_t^{-1} ({\mathbf{y} - H\hat{\mathbf{x}}_t}) \quad //链式法则 \\
&= (H \frac{\partial \hat{\mathbf{x}}_t}{\partial \mathbf{x}_t})^\top (r_t^2 HH^\top + \sigma_y^2 I)^{-1} ({\mathbf{y} - H\hat{\mathbf{x}}_t}) \quad //带入\Sigma_t \\
&= \left(\underbrace{(\mathbf{y} - H\mathbf{\hat{x}}_t)^\top (r_t^2 HH^\top + \sigma_y^2 I)^{-1} H}_{\text{vector}} \underbrace{\left(\frac{\partial \mathbf{\hat{x}}_t}{\partial \mathbf{x}_t}\right)}_{\text{Jacobian}}\right)^\top \quad //\Sigma_t是对称矩阵 \tag 7
\end{align*}\)
当$\sigma_y=0$时(无噪声测量),公式7可以近似为:
\[\begin{align*} \nabla_{\mathbf{x}_t} \log p_t(\mathbf{y}|\mathbf{x}_t) &\approx \left(\underbrace{(\mathbf{y} - H\mathbf{\hat{x}}_t)^\top (r_t^2 HH^\top)^{-1} H}_{\text{vector}} \underbrace{\left(\frac{\partial \mathbf{\hat{x}}_t}{\partial \mathbf{x}_t}\right)}_{\text{Jacobian}}\right)^\top\\ &= r_t^{-2} \left(\underbrace{(\mathbf{y} - H\mathbf{\hat{x}}_t)^\top (HH^\top)^{-1} H}_{\text{vector}} \underbrace{\left(\frac{\partial \mathbf{\hat{x}}_t}{\partial \mathbf{x}_t}\right)}_{\text{Jacobian}}\right)^\top\\ &= r_t^{-2} \left(\underbrace{(\mathbf{y} - H\mathbf{\hat{x}}_t)^\top (H^\dagger)^\top}_{\text{vector}} \underbrace{\left(\frac{\partial \mathbf{\hat{x}}_t}{\partial \mathbf{x}_t}\right)}_{\text{Jacobian}}\right)^\top \quad //H^\dagger = H^\top(HH^\top)^{-1}\\ &=r_t^{-2} \left(\left(\mathbf{H}^\dagger \mathbf{y} - \mathbf{H}^\dagger \mathbf{H} \mathbf{\hat{x}}_t\right)^\top \frac{\partial \mathbf{\hat{x}}_t}{\partial \mathbf{x}_t}\right)^\top \tag 8 \end{align*}\]其中: $H^\dagger = H^\top(HH^\top)^{-1}$ 是矩阵H的Moore-Penrose伪逆。
DPS
Diffusion posterior sampling for general noisy inverse problems提出了一种名为“扩散后验采样 (Diffusion Posterior Sampling, DPS)”的新方法,旨在高效且稳健地解决各种带有测量噪声的线性及非线性逆问题。传统扩散模型在逆问题求解中通常面临两大挑战:一是难以处理测量噪声(伪逆引导就是无噪声版本),二是对非线性正向模型支持不足。DPS 方法通过对后验采样进行创新性近似,有效地克服了这些限制。
DDPM前向过程的SDE方程表达式如下: [ dx = - \frac{\beta(t)}{2} x dt + \sqrt{\beta(t)} dw \tag 1 ]
根据Reverse-SDE其对应的采样过程SDE为:
[
dx = \left[ -\frac{\beta(t)}{2} \boldsymbol{x} - \beta(t)\nabla_{\boldsymbol{x}t} \log p_t(\boldsymbol{x}_t) \right] dt + \sqrt{\beta(t)} d\bar{\boldsymbol{w}} \tag 2
]
可以看出漂移项仅依赖得分函数,可以训练一个去噪得分匹配(Noise Conditional ScoreNetwork)近似,训练的目标如下:
[
\theta^* = \underset{\theta}{\arg\min} \, \mathbb{E}{t \sim U(\varepsilon, 1), \boldsymbol{x}(t) \sim p(\boldsymbol{x}(t) | \boldsymbol{x}(0)), \boldsymbol{x}(0) \sim p_{\text{data}}} \left[ \left| s_\theta(\boldsymbol{x}(t), t) - \nabla_{\boldsymbol{x}_t} \log p(\boldsymbol{x}(t) | \boldsymbol{x}(0)) \right|_2^2 \right] \tag 3
]
对于带条件的采样,根据贝叶斯原理可以将$p(x)$作为先验,从后验$p(x\vert y)$采样,则条件采样下公式2变为:
[
dx = \left[ -\frac{\beta(t)}{2}\mathbf{x} - \beta(t)\left(\nabla_{\mathbf{x}t}\log p_t(\mathbf{x}_t) + \nabla{\mathbf{x}t}\log p_t(\mathbf{y}|\mathbf{x}_t)\right) \right] dt + \sqrt{\beta(t)}d\bar{w}, \tag 4
]
其中:
[
\nabla{x_t} \log p_t(x_t | \mathbf{y}) = \nabla_{x_t} \log p_t(x_t) + \nabla_{x_t} \log p_t(\mathbf{y} | x_t). \tag 5
]
后一项(引导梯度)难以获得解析解,由于其依赖时间t,且y和$x_t$没有显示依赖。
一般地带噪测量y与样本$x_0$有如下公式表示: [ \boldsymbol{y} = \boldsymbol{\mathcal{A}}(\boldsymbol{x}_0) + \boldsymbol{n}, \quad \boldsymbol{y}, \boldsymbol{n} \in \mathbb{R}^n, \quad \boldsymbol{x}_0 \in \mathbb{R}^d \tag 6 ] 其中$\boldsymbol{\mathcal{A}}$为前向测量操作算子,$\boldsymbol{n}$为测量噪声。
后验分布$p(y \vert x_t)$可以分解为: \(\begin{align*} p(\mathbf{y}|\mathbf{x}_t) &= \int p(\mathbf{y}|\mathbf{x}_0, \mathbf{x}_t)p(\mathbf{x}_0|\mathbf{x}_t)d\mathbf{x}_0 \\ &= \int p(\mathbf{y}|\mathbf{x}_0)p(\mathbf{x}_0|\mathbf{x}_t)d\mathbf{x}_0 \tag 7 \end{align*}\) 可以看出$p(\mathbf{x}_0 \vert \mathbf{x}_t)$通常难以获取。
对于DDPM其$x_t$与$x_0$的关系如下: [ x_t = \sqrt{\bar{\alpha}(t)} x_0 + \sqrt{1 - \bar{\alpha}(t)} z, \quad z \sim \mathcal{N}(0, I), \tag 8 ] 命题1: 对于VP-SDE或DDPM采样,$p(x_0|x_t)$在存在唯一的后验均值: [ \hat{\boldsymbol{x}}0 := \mathbb{E}[\boldsymbol{x}_0 | \boldsymbol{x}_t] = \frac{1}{\sqrt{\bar{\alpha}(t)}} \left( \boldsymbol{x}_t + (1 - \bar{\alpha}(t)) \nabla{\boldsymbol{x}t} \log p_t(\boldsymbol{x}_t) \right) \tag 9 ] 可以近似表示为: [ \hat{\mathbf{x}}_0 \approx \frac{1}{\sqrt{\bar{\alpha}(t)}} \left(\mathbf{x}_t + (1 - \bar{\alpha}(t))\mathbf{s}{\theta^{*}}(\mathbf{x}_t, t)\right). \tag {10} ]
DPS核心近似
既然$p(\mathbf{y} \vert \mathbf{x}t)$难以计算,由公式7可知$p(\mathbf{y} \vert \mathbf{x}_t)=\mathbb{E}{\mathbf{x}0 \sim p(\mathbf{x}_0|\mathbf{x}_t)}[p(\mathbf{y} \vert \mathbf{x}_0)]$, 那么用$p(\mathbf{y} \vert \hat{\mathbf{x}}_0)$来近似。
[
p(\mathbf{y}|\mathbf{x}_t) \simeq p(\mathbf{y}|\hat{\mathbf{x}}_0), \text{ where } \hat{\mathbf{x}}_0 := \mathbb{E}[\mathbf{x}_0|\mathbf{x}_t] = \mathbb{E}{\mathbf{x}0 \sim p(\mathbf{x}_0|\mathbf{x}_t)}[\mathbf{x}_0] \tag {11}
]
其近似误差可用Jensen gap来度量:
[
\mathcal{J}(f, x \sim p(x)) = \mathbb{E}[f(x)] - f(\mathbb{E}[x]), \tag {12}
]
定理1: 对于公式6定义的测量,其中$\mathbf{n} \sim \mathcal{N}(0, \sigma^{2} \mathbf{I})$,我们近似:
[
p(\mathbf{y}|\mathbf{x}_t) \simeq p(\mathbf{y}|\hat{\mathbf{x}}_0), \tag {13}
]
则其Jensen gap的上界为:
[
\mathcal{J} \leq \frac{d}{\sqrt{2\pi\sigma^2}} e^{-1/2\sigma^2} |\nabla_x \mathcal{A}(\boldsymbol{x})|{m_1} \tag {14}
]
其中:$ | \nabla_x \mathcal{A}(\boldsymbol{x}) := \max{\boldsymbol{x}} | \nabla_x \mathcal{A}(\boldsymbol{x}) | \text{ and } m_1 := f | x_0 - \hat x_0 | p(x_0 \vert x_t) d x_0$。由公式14可知,测量噪声$\sigma$越大近似误差越小,因此DPS对于噪声类的逆问题效果很好。
由公式13概率分布近似,可以导出它们梯度也近似:
[
\nabla_{x_t} \log p(\mathbf{y} | x_t) \simeq \nabla_{x_t} \log p(\mathbf{y} | \hat{x}0), \tag {15}
]
对于高斯测量噪声:
[
p(\mathbf{y}|\mathbf{x}_0) = \frac{1}{\sqrt{(2\pi)^n \sigma^{2n}}} \exp \left[ - \frac{|\mathbf{y} - \mathcal{A}(\mathbf{x}_0)|_2^2}{2\sigma^2} \right],
]
根据定理1和公式15有:
[
\nabla{\mathbf{x}t} \log p(\mathbf{y}|\mathbf{x}_t) \simeq - \frac{1}{\sigma^2} \nabla{\mathbf{x}t} \left| \mathbf{y} - \mathcal{A}(\hat{\mathbf{x}}_0(\mathbf{x}_t)) \right|_2^2
]
代入公式5有:
[
\nabla{x_t} \log p_t(\mathbf{x}t | \mathbf{y}) \simeq s{\theta*}(\mathbf{x}t, t) - \rho \nabla{x_t} |\mathbf{y} - A(\hat{\mathbf{x}}_0)|_2^2
]
其中:$ρ = 1/\sigma^2$ 可当作步长。
CCDF
[ dx = \bar{\mathbf{f}}(x, t) dt + \bar{\mathbf{g}}(t) dw, ]
[ dx = \left[ \bar{\mathbf{f}}(\mathbf{x}, t) - \bar{g}(t)^2 \underbrace{\nabla_x \log p_t(\mathbf{x})}_{\text{score function}} \right] dt + \bar{g}(t) d\bar{w} ]
[ \bar{\boldsymbol{f}}(\boldsymbol{x},t) = -\frac{1}{2}\beta(t)\boldsymbol{x}, \quad \bar{g}(t) = \sqrt{\beta(t)}, ]
[ \boldsymbol{x}_i = \sqrt{\bar{\alpha}_i} \boldsymbol{x}_0 + \sqrt{1 - \bar{\alpha}_i} \boldsymbol{z} ]
[ \mathbf{x}{i-1} = \frac{1}{\sqrt{\alpha_i}} \left( \mathbf{x}_i + (1 - \alpha_i)\mathbf{s}{\theta}(\mathbf{x}_i, i) \right) + \sqrt{\sigma_i}\mathbf{z}, ]
[ \mathbf{x}{i-1} = \sqrt{\bar{\alpha}{i-1}} \left( \frac{\mathbf{x}i - \sqrt{1 - \bar{\alpha}_i} \mathbf{z}\theta(\mathbf{x}i, i)}{\sqrt{\bar{\alpha}_i}} \right) + \sqrt{1 - \bar{\alpha}{i-1}} \mathbf{z}_\theta(\mathbf{x}_i, i) ]
[ \boldsymbol{z}{\theta}(x, i) := -\boldsymbol{s}{\theta}(x, i)\sqrt{1 - \bar{\alpha}_i}. ]
[ x’_{i-1} = \boldsymbol{f}(x_i, i) + \boldsymbol{g}(x_i, i)z_i ]
[ x_{i-1} = \boldsymbol{A}x’_{i-1} + \boldsymbol{b} ]
[ | \boldsymbol{A}\boldsymbol{x} - \boldsymbol{A}\boldsymbol{x}’ | \le | \boldsymbol{x} - \boldsymbol{x}’ |, \quad \forall \boldsymbol{x}, \boldsymbol{x}’ ]
[ \bar{\varepsilon}{N’} := \mathbb{E} | \mathbf{x}{N’} - \tilde{\mathbf{x}}{N’} |^2 = a^2{N’} \varepsilon_0 + 2 b^2_{N’} n. ]
[ \bar{\varepsilon}{0,r} \leq \frac{2C\tau}{1-\lambda^2} + \lambda^{2N’} \bar{\varepsilon}{N’} ]
[
\lambda = \begin{cases}
\max_{i \in [N’]} \sqrt{\alpha_i} \left( \frac{1 - \bar{\alpha}{i-1}}{1 - \bar{\alpha}_i} \right) & \text{(DDPM)}
\max{i \in [N’]} \frac{\sigma_{i-1}^2 - \sigma_0^2}{\sigma_i^2 - \sigma_0^2} & \text{(SMLD)}
\max_{i \in [N’]} \frac{\sigma_{i-1}}{\sigma_i} & \text{(DDIM)}
\end{cases}
]
[
C = \begin{cases}
n(1 - \alpha_N) & (\text{DDPM})
n \max_{i \in [N’]} \sigma_i^2 - \sigma_{i-1}^2 & (\text{SMLD})
0 & (\text{DDIM})
\end{cases}
]
TRAINING-FREE LINEAR IMAGE INVERSES VIA FLOWS
TRAINING-FREE LINEAR IMAGE INVERSES VIA FLOWS 将TRAINING-FREE的引导生成从扩散模型引入流匹配模型,并提出一种基于条件最优传输(OT)路径的求解器方案。无需重新训练可适用到现有的扩散模型中。
高斯概率路径:
[
q(\mathbf{x}_t|\mathbf{y}, \mathbf{x}_1) = q(\mathbf{x}_t|\mathbf{x}_1) = \mathcal{N}(\alpha_t \mathbf{x}_1, \sigma_t^2 \mathbf{I}) \tag 5
]
其中$x_0为纯噪声,x_1为数据分布,对于OT概率路径有: \alpha_t=1-t,\sigma_t=t$。
测量值y定义如下: [ y = Ax_1 + \epsilon \quad //其中\epsilon \sim \mathcal{N}(0,\sigma_y^2\mathbf{I}) \tag 7 ]
得分引导到速度场引导
由An Introduction to Flow Matching and Diffusion Models的公式54可知速度场和得分存在如下关系
\(\begin{equation*}
u_t(x) =\beta_t^2 \frac {d ln(\frac {\alpha_t} {\beta_t})} {dt} s_t (x) + \frac {d ln(\alpha_t)} {dt} x
\end{equation*}\)
将变量表示替换为本文的有:
\(\begin{equation*}
v(\mathbf{x}_t) =\sigma_t^2 \frac {d ln(\frac {\alpha_t} {\sigma_t})} {dt} \nabla_{\mathbf{x}_t} \ln q(\mathbf{x_t}) + \frac {d ln(\alpha_t)} {dt} \mathbf{x}_t
\end{equation*}\)
响应的条件速度场和条件得分的关系如下:
\(\begin{equation*}
v(\mathbf{x}_t,\mathbf{y}) =\sigma_t^2 \frac {d ln(\frac {\alpha_t} {\sigma_t})} {dt} \nabla_{\mathbf{x}_t} \ln q(\mathbf{x_t}|\mathbf{y}) + \frac {d ln(\alpha_t)} {dt} \mathbf{x}_t
\end{equation*}\)
两式相减有:
\(\begin{align*}
v(\mathbf{x}_t, \mathbf{y}) - v(\mathbf{x}_t) &= \sigma_t^2 \frac{d \ln(\alpha_t/\sigma_t)}{dt} \left(\nabla_{\mathbf{x}_t} \ln q(\mathbf{x_t}|\mathbf{y})-\nabla_{\mathbf{x}_t} \ln q(\mathbf{x_t}) \right) \\
\Leftrightarrow v(\mathbf{x}_t, \mathbf{y}) - v(\mathbf{x}_t) &= \sigma_t^2 \frac{d \ln(\alpha_t/\sigma_t)}{dt} \nabla_{\mathbf{x}_t} \ln q(\mathbf{y}|\mathbf{x}_t) \quad // 加恒为0的\nabla_{\mathbf{x}_t}\ln q(\mathbf{y}) \\
\Leftrightarrow v(\mathbf{x}_t, \mathbf{y}) &= v(\mathbf{x}_t) + \sigma_t^2 \frac{d \ln(\alpha_t/\sigma_t)}{dt} \nabla_{\mathbf{x}_t} \ln q(\mathbf{y}|\mathbf{x}_t) \tag {11}
\end{align*}\)
使用ΠGDM伪逆近似后有:
\(\begin{equation}
\widehat{\boldsymbol{v}}(\boldsymbol{x}_t, \boldsymbol{y}) = \widehat{\boldsymbol{v}}(\boldsymbol{x}_t) + \sigma_t^2 \frac{d \ln(\alpha_t/\sigma_t)}{dt} \gamma_t \nabla_{\boldsymbol{x}_t} \ln q^{app}(\boldsymbol{y}|\boldsymbol{x}_t) \tag {12}
\end{equation}\)
其中$\gamma_t$ 是一个权重因子,用于调整公式(12)中引导项的强度。
本文假设先验分布也是标准高斯分布 $q(x_1) \sim \mathcal{N}(0, I)$,(这是一个很强的假设,显然先验数据分布不会是高斯分布)。 则后验分布的方差为 (后面会证明) : [ r_t^2 = \frac{\sigma_t^2}{\sigma_t^2 + \alpha_t^2} \tag {13} ]
后验分布 (q(x_1|x_t)) 推导
推导基于一个标准的贝叶斯推断过程:已知先验分布 (q(x_1)) 和似然函数 (q(x_t|x_1)),求解后验分布 (q(x_1|x_t)) 的方差参数 (r_t^2)。其核心原因是高斯分布的共轭性质。
推导步骤与假设
推导基于以下三个关键假设:
- 数据先验分布:$q(x_1) = \mathcal{N}(x_1; 0, I)$。这是推导的起点,也是得出简洁解析解 (r_t^2 = \frac{\sigma_t^2}{\sigma_t^2 + \alpha_t^2}) 的原因。
- 扩散前向过程:$q(x_t \vert x_1) = \mathcal{N}(x_t; \alpha_t x_1, \sigma_t^2 I)$。这是扩散模型的标准参数化形式,其中 (\alpha_t) 和 (\sigma_t) 是已知的时间依赖函数。
- 后验分布形式:根据高斯共轭性,后验 (q(x_1 \vert x_t)) 也是高斯分布,我们将其参数化为 $\mathcal{N}(x_1; \widehat{x}_1(x_t), r_t^2 I)$。其中 (\widehat{x}_1(x_t)) 是后验均值,(r_t^2) 是待求的后验方差标量。
下面是详细的推导过程:
\[\begin{aligned} & \text{目标:求后验分布 } q(x_1|x_t) \propto q(x_t|x_1) \cdot q(x_1) \\ \\ & 1. \text{ 写出先验与似然的概率密度函数(忽略常数项)} \\ & \log q(x_1) = -\frac{1}{2} x_1^\top x_1 + \text{const}. \quad // \text{标准高斯先验} \\ & \log q(x_t|x_1) = -\frac{1}{2\sigma_t^2} (x_t - \alpha_t x_1)^\top (x_t - \alpha_t x_1) + \text{const}. \\ \\ & 2. \text{ 相加得到非归一化的对数后验} \\ & \log [q(x_t|x_1) q(x_1)] = -\frac{1}{2} \left[ \frac{1}{\sigma_t^2} (x_t - \alpha_t x_1)^\top (x_t - \alpha_t x_1) + x_1^\top x_1 \right] + \text{const} \\ \\ & 3. \text{ 展开并合并关于 } x_1 \text{ 的二次项和一次项} \\ & \text{展开:} (x_t - \alpha_t x_1)^\top (x_t - \alpha_t x_1) = x_t^\top x_t - 2\alpha_t x_t^\top x_1 + \alpha_t^2 x_1^\top x_1 \\ & \text{代入并合并:} \\ & \log [\cdot] = -\frac{1}{2} \left[ \frac{\alpha_t^2}{\sigma_t^2} x_1^\top x_1 + x_1^\top x_1 - \frac{2\alpha_t}{\sigma_t^2} x_t^\top x_1 + \frac{1}{\sigma_t^2} x_t^\top x_t \right] + \text{const} \\ & = -\frac{1}{2} \left[ \underbrace{\left( \frac{\alpha_t^2}{\sigma_t^2} + 1 \right)}_{\text{二次项系数}} x_1^\top x_1 - \underbrace{\frac{2\alpha_t}{\sigma_t^2} x_t^\top}_{\text{一次项系数}} x_1 \right] + \text{(与 } x_1 \text{ 无关的项)} \\ \\ & 4. \text{ 与高斯分布的标准形式对比,提取后验方差和均值} \\ & \text{高斯对数密度标准形式:} \log \mathcal{N}(x_1; \mu, \Sigma) = -\frac{1}{2} (x_1 - \mu)^\top \Sigma^{-1} (x_1 - \mu) + \text{const} \\ & = -\frac{1}{2} x_1^\top \Sigma^{-1} x_1 + x_1^\top \Sigma^{-1} \mu + \text{const}. \\ \\ & \text{对比系数:} \\ & \text{二次项系数:} \Sigma^{-1} = \left( \frac{\alpha_t^2}{\sigma_t^2} + 1 \right) I = \frac{\sigma_t^2 + \alpha_t^2}{\sigma_t^2} I \\ & \Rightarrow \quad \Sigma = \frac{\sigma_t^2}{\sigma_t^2 + \alpha_t^2} I \\ & \text{一次项系数:} \Sigma^{-1} \mu = \frac{\alpha_t}{\sigma_t^2} x_t \\ & \Rightarrow \quad \mu = \Sigma \cdot \frac{\alpha_t}{\sigma_t^2} x_t = \frac{\sigma_t^2}{\sigma_t^2 + \alpha_t^2} \cdot \frac{\alpha_t}{\sigma_t^2} x_t = \frac{\alpha_t}{\sigma_t^2 + \alpha_t^2} x_t \\ \\ & 5. \text{ 得到结果} \\ & \text{后验方差:} \quad r_t^2 = \frac{\sigma_t^2}{\sigma_t^2 + \alpha_t^2} \quad // \text{即公式 (13)} \\ & \text{后验均值:} \quad \widehat{x}_1(x_t) = \frac{\alpha_t}{\sigma_t^2 + \alpha_t^2} x_t \end{aligned}\]速度场与干净样本后验估计的关系
已知 $q(x_t \vert x_1) = \mathcal{N}(x_t; \alpha_t x_1, \sigma_t^2 I)$ 由Tweedies公式有:
\[\begin{align*} \mathbb{E}[\alpha_t\mathbf{x}_1 | \mathbf{x}_t] &= \mathbf{x}_t + \sigma_t^2 s_\theta(\mathbf{x}; \sigma_t) \\ \Leftrightarrow \alpha_t \mathbb{E}[\mathbf{x}_1 | \mathbf{x}_t] &= \mathbf{x}_t + \sigma_t^2 s_\theta(\mathbf{x}; \sigma_t) \end{align*}\]得分与速度场由如下关系:
\(\begin{equation*}
s_t^\theta (x) = \frac {u_t^\theta (x) - \frac {d ln(\alpha_t)} {dt} x} {\beta_t^2 \frac {d ln(\frac {\alpha_t} {\beta_t})} {dt} }
\end{equation*}\)
带入得分与速度场的关系(并使用本文的表示符号):
\[\begin{align*} \alpha_t \mathbb{E}[\mathbf{x}_1 | \mathbf{x}_t] &= \mathbf{x}_t + \sigma_t^2 s_\theta(\mathbf{x}; \sigma_t) \\ \Leftrightarrow \alpha_t \hat {x}_1&=\mathbf{x}_t + \frac {\hat v - \frac {d ln(\alpha_t)} {dt} \mathbf{x}_t} { \frac {d ln(\frac {\alpha_t} {\sigma_t})} {dt} } \\ \Leftrightarrow \left( \alpha_t \frac{\mathrm{d} \ln(\alpha_t / \sigma_t)}{\mathrm{d}t} \right) \hat{x}_1 &=\hat v +\left(\frac {d ln(\frac {\alpha_t} {\sigma_t})} {dt} - \frac {d ln(\alpha_t)} {dt}\right)\mathbf{x}_t \\ \Leftrightarrow \left( \alpha_t \frac{\mathrm{d} \ln(\alpha_t / \sigma_t)}{\mathrm{d}t} \right) \hat{x}_1 &=\hat v - \frac{\mathrm{d} \ln \sigma_t}{\mathrm{d}t} x_t \\ \Leftrightarrow \hat{v} &= \left( \alpha_t \frac{\mathrm{d} \ln(\alpha_t / \sigma_t)}{\mathrm{d}t} \right) \hat{x}_1 + \frac{\mathrm{d} \ln \sigma_t}{\mathrm{d}t} x_t. \tag 8 \end{align*}\]不同概率路径的等价性
引理 2. 考虑两条高斯概率路径 q 和 q′,它们由公式 5 定义,均值和标准差分别为$\alpha_t,\sigma_t$ 和 $\alpha_t’,\sigma_t’$。 定义 t′(t) 为给定 t 时,使得 $\alpha_t/\sigma_t=\alpha_t’/\sigma_t’$ 的唯一解。则: \(\begin{equation*} \mathbb{E}_q[\mathbf{x}_1|\mathbf{x}_t, \mathbf{y}] = \mathbb{E}_{q'}[\mathbf{x}_1|\mathbf{X}'_{t'(t)} = \alpha'_{t'(t)}\mathbf{x}_t/\alpha_t, \mathbf{y}] \tag 9 \end{equation*}\) 这使得我们可以用任意一种噪声调度的模型(如预训练的模型)来模拟另一种噪声调度模型的推理过程,无需重新训练模型。
证明:
1. 共享先验分布
[
q(x_1|y) = q’(x_1|y)
]
即两个路径在给定条件 ( y ) 下,关于 ( x_1 ) 的先验分布相同。
2. 转移概率的等价性
对于高斯路径,转移概率密度为:
[
q(x_t|x_1, y) = \mathcal{N}(x_t; \alpha_t x_1, \sigma_t^2 I)
\Leftrightarrow x_{t} = \alpha_{t} x_1 + \sigma_{t} z
\Leftrightarrow \frac{x_t}{\alpha_t} = x_1 + \frac{\sigma_t}{\alpha_t} z
]
类似地:
[
q’(x_{t’}|x_1, y) = \mathcal{N}(x_{t’}; \alpha_{t’}’ x_1, \sigma_{t’}’^2 I)
\Leftrightarrow x_{t’}’ = \alpha_{t’}’ x_1 + \sigma_{t’}’ z
\Leftrightarrow \frac{x_{t’}’}{\alpha_{t’}’} = x_1 + \frac{\sigma_{t’}’}{\alpha_{t’}’} z
]
当 ( t’ = t’(t) ) 满足: [ \frac{\sigma_t}{\alpha_t} = \frac{\sigma_{t’}’}{\alpha_{t’}’} ]
可以建立对应关系: [ x_{t’(t)}’ = \frac{\alpha_{t’(t)}’}{\alpha_t} x_t ] 两者在给定 ( x_1, y ) 时具有相同的分布形式。
因此,在概率密度意义上: [ q(x_t|x_1, y) = q’\left( x_{t’(t)}’ = \frac{\alpha_{t’(t)}’}{\alpha_t} x_t \,\bigg|\, x_1, y \right) ] 即两个转移概率在重新缩放后一致。
3. 联合分布相同 由于先验 ( q(x_1|y) = q’(x_1|y) ) 且转移概率在对应时间点等价(经缩放),因此联合分布满足: [ q(x_t, x_1 | y) = q’(x_{t’(t)}’, x_1 | y) ] 在对应变量替换下一致。
4. 条件期望相等 条件期望 ( \mathbb{E}[x_1|x_t, y] ) 完全由联合分布 ( q(x_1, x_t | y) ) 决定。既然两个路径的联合分布在对应点相同,它们的条件期望也应相同:
\[\begin{equation*} \mathbb{E}_q[x_1|x_t, y] = \mathbb{E}_{q'}[x_1|x_{t'(t)}', y] \end{equation*}\]由于信噪比相同,两个路径的线性系数一致,且缩放因子 ( \alpha_{t’(t)}’ / \alpha_t ) 来自变量对应关系 ( x_{t’(t)}’ = \frac{\alpha_{t’(t)}’}{\alpha_t} x_t )。
算法流程
算法1
预训练的去噪网络,通过条件OT概率路径流获取引导后的样本
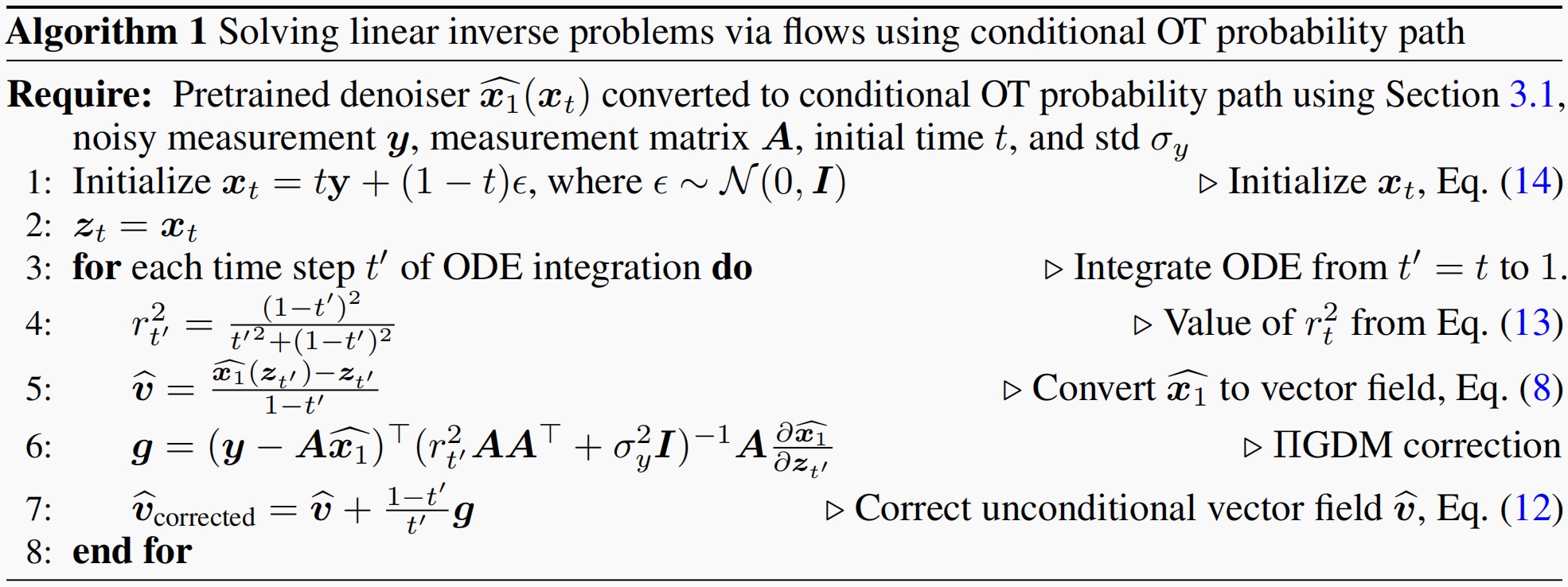
对于OT路径$\alpha_t=t,\beta_t=1-t$ 速度场:
\[\begin{align*} \hat{v} &= \left( \alpha_t \frac{\mathrm{d} \ln(\alpha_t / \sigma_t)}{\mathrm{d}t} \right) \hat{x}_1 + \frac{\mathrm{d} \ln \sigma_t}{\mathrm{d}t} x_t \tag 8 \\ &= \left( t \frac{\mathrm{d} \ln(t / (1-t))}{\mathrm{d}t} \right) \hat{x}_1 + \frac{\mathrm{d} \ln (1-t)}{\mathrm{d}t} x_t \quad// \alpha_t=t,\beta_t=1-t \\ &=t(\frac 1 t - \frac {-1} {1-t})\hat{x}_1+\frac {-1} {1-t}x_t \\ &=\frac {\hat{x}_1} {1-t} - \frac {x_t} {1-t} \end{align*}\]引导系数:
\[\begin{align*} \sigma_t^2 \frac{\mathrm{d} \ln(\alpha_t / \sigma_t)} {dt} &= (1-t)^2\frac{\mathrm{d} \ln(t / (1-t))}{\mathrm{d}t} \\ &=(1-t)^2(\frac 1 t - \frac {-1} {1-t}) \\ &=(1-t)^2 \frac 1 {t(1-t)} \\ &=\frac {1-t} {t} \end{align*}\]算法2
预训练的去噪网络,通过等价的概率路径流获取引导后的样本
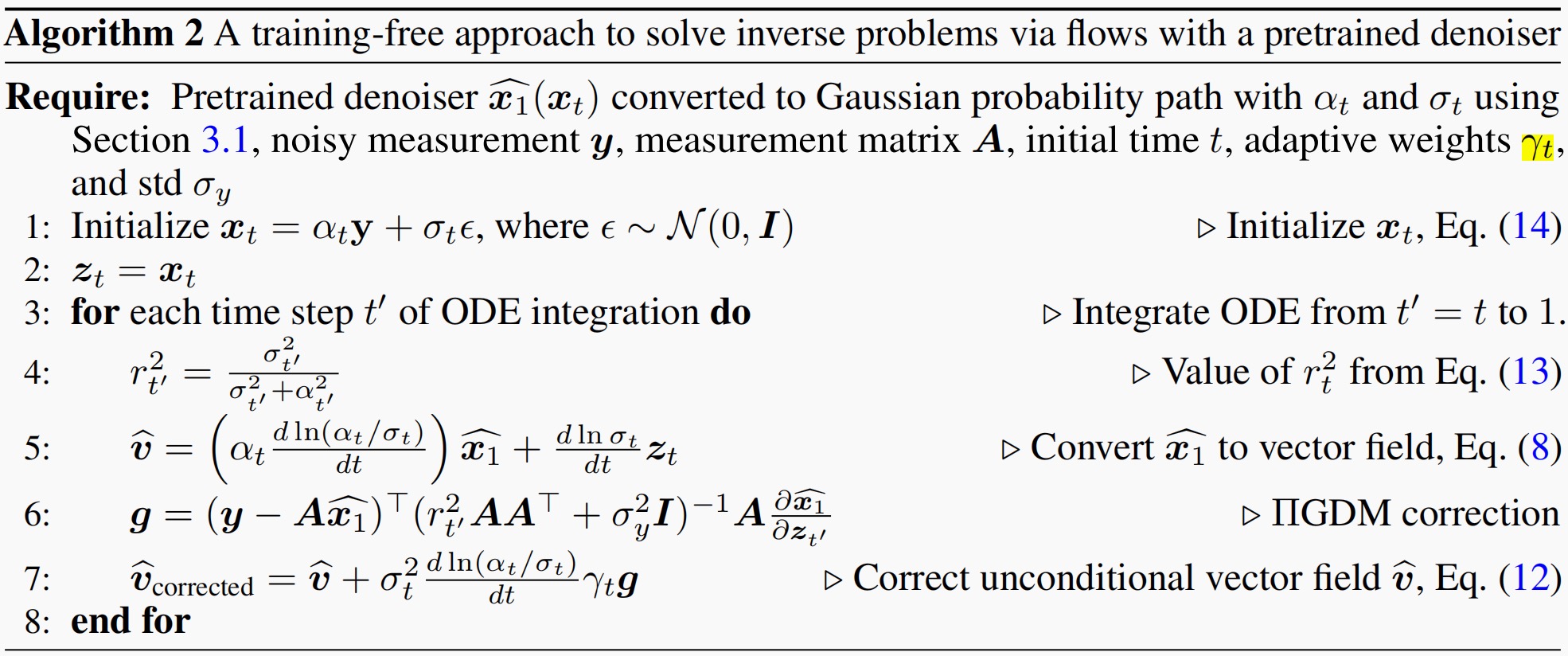
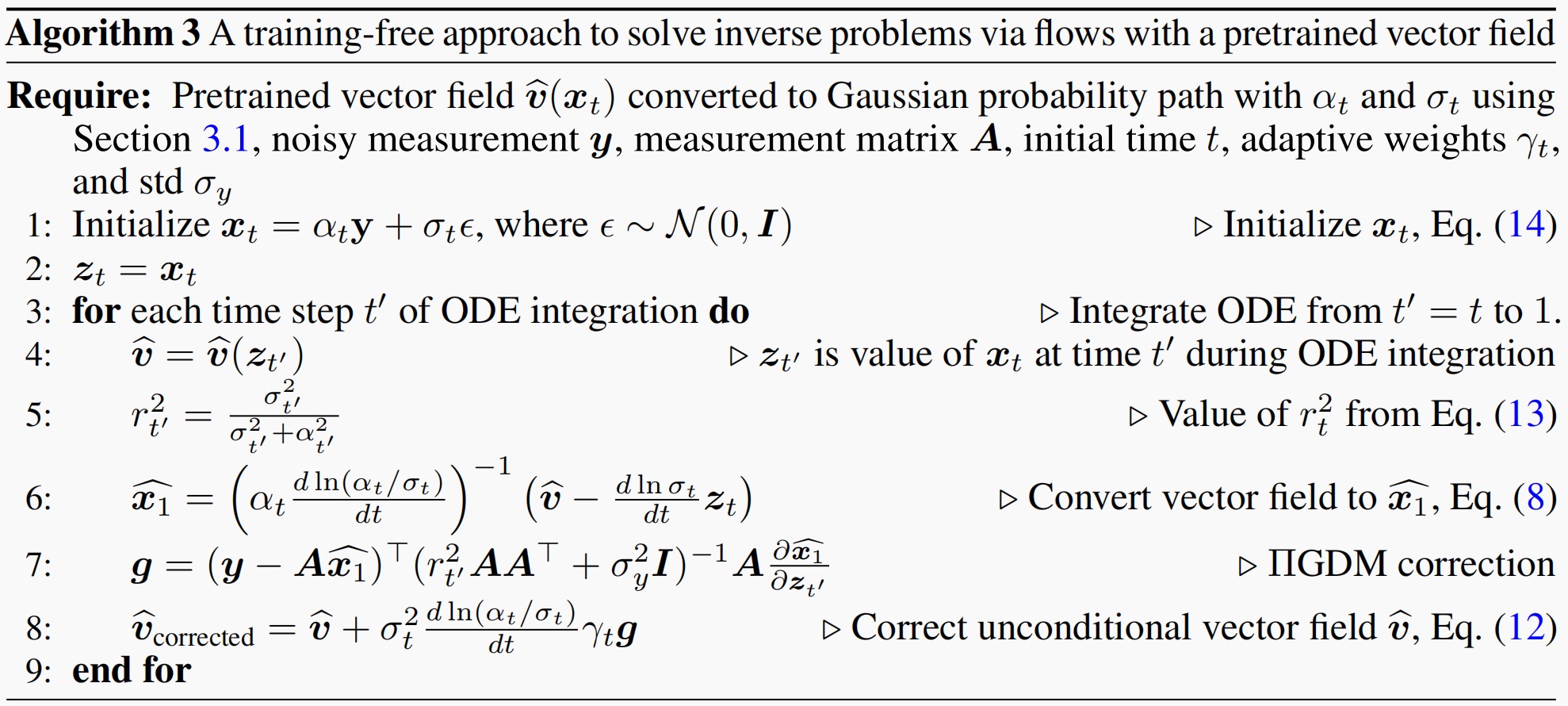
算法3
预训练的速度场,仅增加引导项
RTC
Real-Time Execution of Action Chunking Flow Policies
\[\begin{equation*} \mathbf{v}_{IIGDM}(\mathbf{A}_t^{\tau}, \mathbf{o}_t, \tau) = \mathbf{v}(\mathbf{A}_t^{\tau}, \mathbf{o}_t, \tau) + \min\left(\beta, \frac{1 - \tau}{\tau \cdot r_\tau^2}\right)\left(\mathbf{Y} - \widehat{\mathbf{A}_t^1}\right)^\top \text{diag}(\mathbf{W}) \frac{\partial \widehat{\mathbf{A}_t^1}}{\partial \mathbf{A}_t^\tau} \tag 2 \end{equation*}\]其中,
\[\begin{equation*} \widehat{\mathbf{A}_t^1} = \mathbf{A}_t^\tau + (1 - \tau)\mathbf{v}(\mathbf{A}_t^\tau, \mathbf{o}_t, \tau), \tag 3 \end{equation*}\][ r_\tau^2 = \frac{(1 - \tau)^2}{\tau^2 + (1 - \tau)^2}. \tag 4 ]
注意:在RTC中样本值到观测值为恒等映射。$\mathbf{W}$为引导权重,$\beta$是裁剪因子